
Cyber-Physical Systems
A cyber-physical system, or CPS, is created when devices are linked together in such a way that data collected in both the cyber and physical spheres can influence the behavior of the system as a whole. Individual computers and networks are embedded throughout the system to monitor and control physical activity. Most CPSs feature feedback loops where data collected has an impact on both computation and physical action. Considered in the abstract, a CPS is about the intersection of cyber and physical assets rather than fusing them together.
A cyber-physical system cannot be described or understood simply by examining its separate physical and computational components. They way they interact is a fundamental part of the system.
The term “cyber-physical systems” first came into use in 2006. Helen Gill of the National Science Foundation of the US coined the term. There is a strong temptation to conflate the idea of a CPS with the term “cyberspace,” but the two terms have far less to do with each other than first sight suggests. The most accurate way to consider the matter is to note that both terms derive from the common root word, cybernetics. (This term was popularized by the American mathematician Norbert Wiener.) Cyber-physical systems and cyberspace are broadly related, but they are siblings or cousins at best. There is no parent-child relationship here.
Applications For CPS
It is a bold but not baseless assertion to predict that CPS applications may be even more transformative than the information technology revolution that came at the end of the 20th century. Consider these practical examples of what a CPS could do:
Heart Surgery
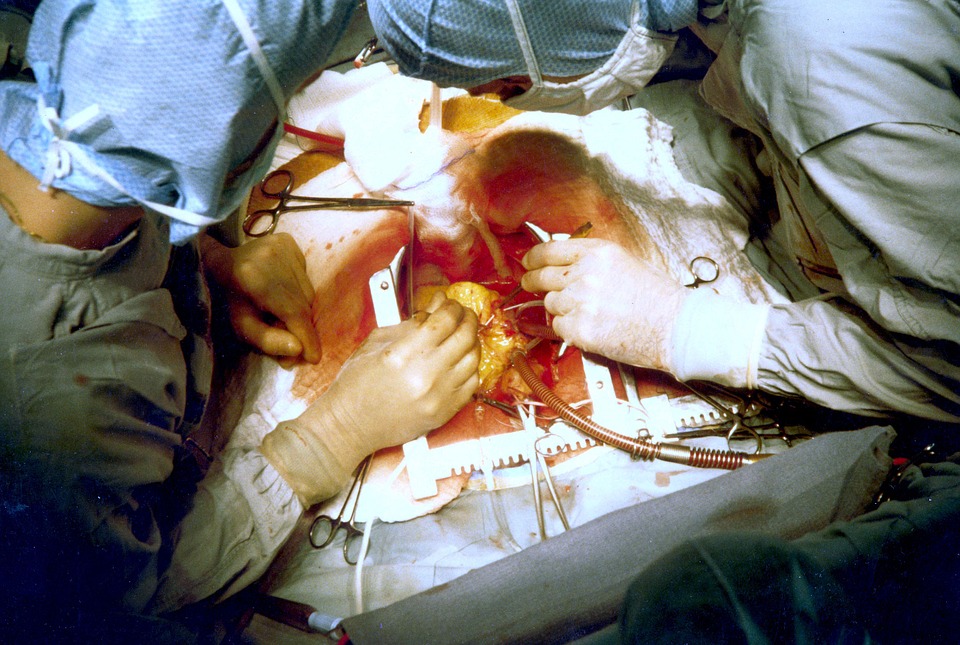
Many forms of heart surgery require doctors to stop the heart before they can operate and then restart it when their work is finished. This process has a lot of obvious risks and the likelihood of negative side effects is high. Today, multiple research terms are working toward new surgical techniques that would allow a surgeon to operate usefully on a beating heart without stopping it. This possibility rests on two key technologies. First, robotic control can enhance the tools required for the surgery and enable them to match the movement of a beating heart. This would allow a surgeon to apply precise and constant pressure without stopping the heart. The second technological prerequisite is an imaging system that allows the surgeon to look at an illusory but accurate representation of an unbeating heart. This view would enable the surgeon to make accurate and useful decisions about how to proceed without interrupting the patient’s heartbeat. Bringing this technology together into a safe and effective system requires precise modeling of the patient’s heart, the surgical tools, and the hardware and software creating the interface between patient and surgeon. The software involved in this surgery would have to be extremely robust, incorporating redundant fail-safes and fallbacks so that malfunctions would not injure the patient. To achieve satisfactory reliability, both the system and its sensors would have to be extremely accurate.
Traffic Management
Keeping a city’s traffic flow efficient is a challenge. What about a community where the city’s infrastructure (e.g. traffic lights) and the cars on the road cooperated to reduce inefficiencies? As a simple starting point, imagine a traffic light intelligent enough to never present a red light unless cross traffic was actually present. This is well within current capabilities, but a CPS could go much further. Vehicles themselves could be part of the system, constantly reporting their positions and sharing road resources more efficiently. Of course, where vehicle traffic is a concern, reliability and safety must be paramount. Engineering a traffic CPS reliable enough to eliminate deadly failures is a formidable challenge.